Porting L4Re and Fiasco.OC to the Ben NanoNote (Part 9)
Thursday, March 29th, 2018After all my effort modifying the Fiasco.OC kernel, adapting driver code for the Ben NanoNote to work in the L4 Runtime Environment (L4Re), I had managed to demonstrate programs that could access the framebuffer and thus show things on the screen. But my stated goal is to demonstrate the functioning of existing code and a range of different components, specifically the “spectrum” example, GUI multiplexer (Mag), and framebuffer driver (fb-drv), supported by additional driver functionality I have added myself.
Still to do were the tasks of getting the framebuffer driver to access my LCD driver, getting Mag to work on top of that, and then getting the “spectrum” example to work as it had done with Fiasco.OC-UX. Looking back at this exercise now, I can see that it is largely a case of wiring up the components just as we saw earlier when I showed how to get access to the hardware through the Io server. But this didn’t prevent excursions into the code for some debugging operations or a few, more lasting, modifications.
Making a Splash
I had sought to test the entire stack consisting of the example, GUI multiplexer, framebuffer driver, and the rest of the software using a configuration derived from both the UX “spectrum” demonstration (found in l4/conf/examples/x86-fb.cfg) and the corresponding demonstration for ARM-based devices (found in l4/conf/examples/arm-rv-lcd.cfg). Unsurprisingly, this did not work, and so I started out stripping down my own example configuration in order to test the components individually.
On the way, I learned a few things that I wished I’d realised earlier. The first one is pretty mundane but very important. In order to strip down the configuration, I had tried to comment out various components and had done so using the hash symbol (#), which vim had helped to make me believe was a valid comment symbol. In fact, in Lua, if the hash symbol can be used for “program metadata”, perhaps for the usual Unix scripting declaration, then its use may be restricted to such narrow purposes and no others (as far as I could tell from quickly looking through the documentation). Broader use of the symbol appears to involve it acting as the length operator.
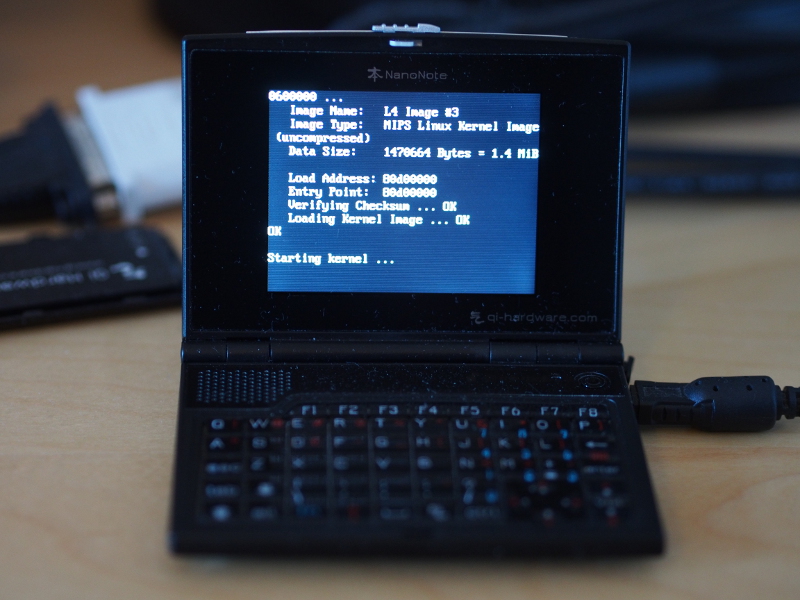
By making an assumption almost instinctively, due to the prevalence of the hash character as a comment symbol in Unix scripting, I was now being confronted with “Starting kernel …” and nothing more, making me think that I had really broken something. I had to take several steps back, consider what might really be happening, that the Ned task responsible for executing the configuration had somehow failed, and then come to the realisation that were I able to read the serial console output, I would be staring at a Lua syntax error!
So, removing the configuration details that I didn’t want to test straight away, I set about testing the framebuffer driver all by itself. Here is the configuration file involved (edited slightly):
local io_buses =
{
fbdrv = l:new_channel();
};
l:start({
caps = {
fbdrv = io_buses.fbdrv:svr(),
icu = L4.Env.icu,
sigma0 = L4.cast(L4.Proto.Factory, L4.Env.sigma0):create(L4.Proto.Sigma0),
},
},
"rom/io -vvvv rom/hw_devices.io rom/mips-qi_lb60-fbdrv.io");
local fbdrv_fb = l:new_channel();
l:startv({
caps = {
vbus = io_buses.fbdrv,
fb = fbdrv_fb:svr(),
},
},
"rom/fb-drv", "-c", "nanonote"); -- configuration passed to the LCD driver
It was around this time that I discovered the importance of the naming of certain things, noted previously, and so in the accompanying Io configuration, the devices are added to a vbus called “fbdrv”. What this example should do is to run just the framebuffer driver (fb-drv) and the Io server.
Now, you might be wondering what the point of running just the driver, without any client programs, might be. Well, I had noticed that the driver should show a “splash screen”, and so I eagerly anticipated seeing whatever the L4Re developers had decided to show to us upon the driver starting up. Unfortunately, all I got was a blank screen. That made me think some bad things about what might be happening in the code. Fortunately, it didn’t take me long to realise what the problem was, discovering the following (in l4/pkg/fb-drv/server/src/splash.cc):
if (fb_info->width < SPLASHNAME.width) return; if (fb_info->height < SPLASHNAME.height) return;
Meanwhile, in the source file providing the screen data (l4/pkg/fb-drv/server/data/splash1.c), I saw that the width and height of the image were given as being 480 pixels and 65 pixels respectively. The Ben’s screen is 320 pixels wide and 240 pixels high, thus preventing the supplied image from being shown.
It seemed worthwhile trying to replace this image just to reassure myself that the driver was actually working. The supplied image was exported from GIMP and so I attempted to reproduce this by loading one of my own images into GIMP, cropping to 320×240, and saving as a C source file with run-length encoding, 3 bytes per pixel, just as the supplied image had been created. I then copied it into the appropriate package subdirectory (l4/pkg/fb-drv/server/data) and modified the Makefile (l4/pkg/fb-drv/server/src/Makefile), changing it to reference my image instead of the supplied one.
I also needed to change a few other things in the Makefile, as it turned out, such as the definitions of the sources and libraries used by MIPS architecture devices. It was odd to encounter architecture-specific artefacts at this level in the system, but I suppose that different architectures tend to employ different kinds of display mechanisms: the x86 architecture and derivatives have their “legacy” devices; other architectures used in system-on-a-chip products have other peripherals and devices. Anyway, building the payload and booting the Ben gave me this:

The Ben NanoNote showing my L4Re framebuffer driver splash screen: rainbow lorikeets on a suburban lawn
So, the framebuffer driver will happily run, showing its splash screen until something connects to it and gets something else onto the screen. Here, we just let it run by itself until it is time to switch off!
Missing Inputs
There was still one component to be tested before arriving at the “spectrum” example: the GUI multiplexer, Mag. But testing it alone did not necessarily seem to make sense, because unlike the framebuffer driver, Mag’s role is merely to arbitrate between different framebuffer clients. So testing it and some kind of example together seemed like the only workable strategy.
I tried to test it with the “spectrum” example, but I only ever saw the framebuffer splash screen, so it seemed that either the example or Mag wasn’t working. But if it were Mag that wasn’t working, how would I be able to find my way to the problem? I briefly considered whether Mag had a problem with the display configuration, given that I had already seen such a problem, albeit a minor one, in the framebuffer driver.
I chased references around the source code until I established that Mag was populating a fixed-length array of “factory” objects defined in one place (l4/pkg/mag-gfx/include/factory) whose members were statically defined in another place (l4/pkg/mag/server/src/screen.cc), each one indicating how to deal with a particular pixel format. Such objects being of type Mag_gfx::Mem::Factory are returned in the Mag main program (in pkg/mag/server/src/main.cc) when the following code is executed:
Screen_factory *f = dynamic_cast<Screen_factory*>(Screen_factory::set.find(view_i.pixel_info));
I had wondered whether f was being presented with a null value and thus stopping Mag right there, but since there was a suitable factory object being created for the Ben’s pixel format, it seemed rather unlikely. So, the only approach I had considered at this point was not a particularly convenient one: I would have to replicate Mag piece by piece until discovering which part of it caused it to fail.
I set out with a simple example borrowing code from Mag that requests a memory region via a capability or channel, displaying some data on the screen. This managed to work. I then expanded the example, adding various data structures, copying functionality into the example directory from Mag, slowly reassembling what Mag had been all along. Things kept working, right until the point where I needed to set the example going as a server rather than have it wait in an infinite loop doing nothing. Then, the screen would very briefly show the splash image, then the bit patterns, and then go blank.
But maybe Mag was going to clear the framebuffer anyway and thus the server loop was working? Perhaps this was what success actually looked like under these circumstances, which is to say that it did not involve seeing two brightly-coloured birds on a lawn. At this point, out of laziness, I had avoided integrating the plugins into my example, and that was the only remaining difference between it and Mag.
I started to realise that maybe it was a matter of removing things from Mag and seeing if I could get it to work, and the obvious candidates for removal were the plugins. So I removed all the plugins as defined in the Makefile (found at pkg/mag/server/src/Makefile) and tested to see if it changed Mag’s behaviour. Sure enough, the screen went blank. I then added plugins back one by one, knowing by now that the mag-client_fb plugin was going to be required to get the example working.
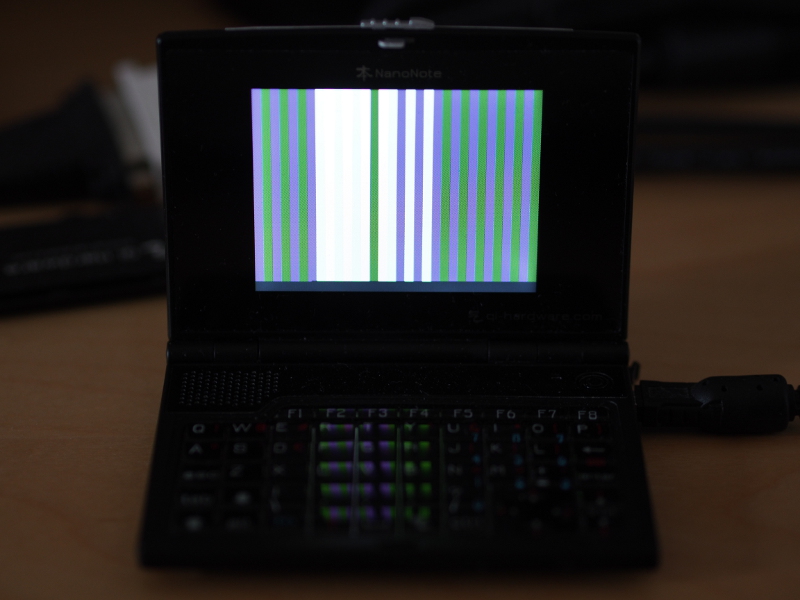
Well, it turned out that there was one plugin causing all the problems: mag-input-libinput. Removing that got the “spectrum” example to work:

The Ben NanoNote showing the "spectrum" framebuffer example
Given that I haven’t addressed the matter of supporting input devices, which for the Ben would mostly concern the keyboard, disabling this errant plugin seemed like a reasonable compromise for now.
Update: a description of a remedy for the problem with the plugin is described in the summary article.
A Door Opens?
There isn’t much left to be said, which perhaps makes the ending something of an anticlimax. But perhaps this is part of the point of the exercise, that the L4Re/Fiasco.OC combination now just seems to work on the Ben NanoNote, and that it could potentially in future be just another thing that this software supports. Of course, the Ben is such a relatively rare device that it isn’t likely to have many potential users, but the SoC family of which the JZ4720 is a part is employed by a number of different devices.
If there haven’t been any privately-maintained ports of this software to those other devices, then this work potentially opens the door to its use on other handheld devices like the GCW Zero or any number of randomly-sourced pocket games consoles, portable media players, and even smartwatches and wearable devices, all of which have been vehicles for the SoC vendor’s products. The Letux 400 could probably be supported given the similarity of its own SoC, the JZ4730, to that used in the Ben.
When the Ben was released, work had been done, first by the SoC vendor, then by the Qi Hardware people, to provide a functioning GNU/Linux system for the device. Clearly, there isn’t an overwhelming need for another kind of system if the intention is to just use the device with existing Free Software. But perhaps this is another component in this exercise: to make other technological solutions possible and to explore avenues that get ignored as everyone follows the mainstream. The Ben is hardly a mainstream product itself; why not use it to make other alternative choices?
It seems interesting to consider writing other drivers for the Ben and to gain experience with microkernel-based systems design. The Genode framework might also be worth investigating, given its focus on becoming a system suitable for deployment to end-users. The Hurd was also ported in an exploratory fashion to one of the L4 implementations some time ago, and revisiting this might be possible, even simplifying the effort thanks to the evolution in features provided by implementations like Fiasco.OC.
In any case, I hope that this account has been vaguely interesting and entertaining. If you managed to read it all, you deserve my sincere thanks for spending the time to do so. A summary of the work will probably follow, and the patches themselves are available on a page dedicated to the effort. Good luck with your own investigations into alternative Free Software operating systems!
{kind=link}